No último post falei sobre a Equação de Euler-Lagrange. Neste post darei um exemplo onde aplicamos a equação de Euler-Lagrange para determinar a equação do movimento de um sistema físico.
No esquema da figura abaixo, vemos uma barra homogênea de massa $m$ e comprimento $l$ pendurada numa mola suspensa de constante de elasticidade $k$. A mola está no interior de uma calha de altura $l_0$ de modo a evitar qualquer movimento que não seja vertical. A barra pode oscilar em torno do ponto $A$.
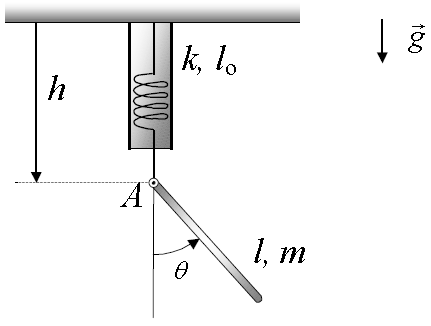
A partir da figura fica claro que o par $(h,\theta)$ forma uma coordenada generalizada para o sistema em questão.
Neste sistemas, temos dois tipos de energia cinética a serem consideradas: a de translação e a de rotação. A energia cinética de translação pode ser calculada olhando apenas para o centro de massa da barra. Seja $r = (x_{cm},y_{cm})$ a posição do centro de massa em relação a um sistema de coordenadas cartesiana com origem na interseção do eixo da mola com o eixo da plataforma (como ilustrado na figura abaixo).

Temos que a energia cinética de translação $T_t$ é dada por
$$ T_{t} = \frac{m\dot{r}^2}{2} = \frac{m (\dot{x}_{cm}^{2} + \dot{y}_{cm}^{2})}{2}. $$
Como $x_{cm} = h + \frac{l}{2} \cos\theta$ e $y_{cm} = \frac{l}{2}\sin\theta$, temos
$$T_t = \frac{m}{2} \left[ \left( \dot{h} - \frac{l}{2}\dot{\theta} \sin\theta \right)^{2} + \left( \frac{l}{2}\dot{\theta} \cos\theta \right)^{2} \right]$$
$$\Longrightarrow T_f = \frac{m}{2} \left[ \dot{h}^2 - l\dot{h}\dot{\theta}\sin\theta + \frac{l^2 \dot{\theta}^2}{4} \right].$$
Já a energia cinética de rotação $T_r$ é dada por
$$ T_r = \frac{I \dot{\theta}^2}{2}, $$
onde $I$ é o momento de inércia da barra, o qual sabemos o seu valor: $I=\frac{ml^2}{12}$. Portanto,
$$ T_r = \frac{ml^2 \dot{\theta}^2}{24}.$$
Agora temos que considerar dois tipos de energia potencial: a gravitacional e a elástica. A energia pontencial gravitacional $U_g$ pode ser determinada como a energia potencial gravitacional de uma única partícula de massa $m$ situada no centro de massa da barra. Assim
$$ U_g = -mgx_{cm} = -mg( h + \frac{l}{2} \cos\theta).$$
Já a energia potencial elástica $U_e$ é dada por
$$ U_e = \frac{k(h-l_0)^2}{2}. $$
Finalmente, temos que a Lagrangiana do sistema é da forma
$$\mathcal{L} = T_t + T_r - U_g - U_e $$
$$ \Longrightarrow \mathcal{L} = \frac{m}{2} \left[ \dot{h}^2 - l\dot{h}\dot{\theta}\sin\theta + \frac{l^2 \dot{\theta}^2}{4} \right] + \frac{ml^2 \dot{\theta}^2}{24} + mg( h + \frac{l}{2} \cos\theta) - \frac{k(h-l_0)^2}{2} $$
$$ \Longrightarrow \mathcal{L} = \frac{1}{2}m \dot{h}^2 - \frac{1}{2}m l\dot{h}\dot{\theta}\sin\theta + \frac{1}{6}ml^2 \dot{\theta}^2 + mg( h + \frac{l}{2} \cos\theta) - \frac{1}{2} k(h-l_0)^2$$
Aplicando a equação de Euler-Lagrange em $h$, temos
$$\frac{d}{dt}\left( \frac{\partial\mathcal{L}}{\partial{\dot{h}}} \right) - \frac{\partial\mathcal{L}}{\partial{h}} = 0 $$
$$\Longrightarrow \frac{d}{dt}\left[ m\dot{h} - \frac{1}{2} ml\dot{\theta}\sin\theta \right] - mg + k(h-l_0) = 0 $$
$$\Longrightarrow \ddot{h}-\frac{1}{2}l\ddot{\theta}\sin\theta - \frac{1}{2}l\dot{\theta}^2\cos\theta - g + \frac{k}{m}(h-l_0) = 0. $$
Aplicando a equação de Euler-Lagrange em $\theta$, temos
$$\frac{d}{dt}\left( \frac{\partial\mathcal{L}}{\partial{\dot{\theta}}} \right) - \frac{\partial\mathcal{L}}{\partial{\theta}} = 0 $$
$$\Longrightarrow \frac{d}{dt}\left[ -\frac{1}{2}ml\dot{h}\sin\theta + \frac{1}{3} ml^2\dot{\theta} \right] + \frac{1}{2}ml\dot{h}\dot{\theta}\cos\theta + \frac{1}{2} mlg\sin\theta = 0 $$
$$\Longrightarrow -\frac{1}{2}ml\ddot{h}\sin\theta - \frac{1}{2}ml\dot{h}\dot{\theta}\cos\theta + \frac{1}{3}ml^2\ddot{\theta} + \frac{1}{2}ml\dot{h}\dot{\theta}\cos\theta + \frac{1}{2} mlg\sin\theta = 0 $$
$$\Longrightarrow 2l\ddot{\theta} +3(g-\ddot{h})\sin\theta = 0. $$
Portanto, o sistema físico tem como equação do movimento o seguinte sistemas de equações diferencias ordinárias:
$$\left\{\begin{array}{l} \ddot{h}-\frac{1}{2}l\ddot{\theta}\sin\theta - \frac{1}{2} l\dot{\theta}^2 \cos\theta - g + \frac{k}{m}(h-l_0) = 0 \\ 2l\ddot{\theta} +3(g-\ddot{h})\sin\theta = 0 \hbox{.} \end{array}\right. $$
Que não é nem um pouco fácil de resolver, mas que seria extremamente penoso obtê-lo por meio do formalismo Newtoniano.
Referências.
[1] Landau, L. D. Lifshitz, E. M. Mechanics. Butterworth-Heinemann. 1976.
[2] Nivaldo A. Lemos. Mecânica Analítica. 2ed. Livraria da Física. 2007.
[3] http://paginas.fe.up.pt/~mines/publicacoes_pedagogicas/apontamentos/IMC_Lagrange.pdf
Agora temos que considerar dois tipos de energia potencial: a gravitacional e a elástica. A energia pontencial gravitacional $U_g$ pode ser determinada como a energia potencial gravitacional de uma única partícula de massa $m$ situada no centro de massa da barra. Assim
$$ U_g = -mgx_{cm} = -mg( h + \frac{l}{2} \cos\theta).$$
Já a energia potencial elástica $U_e$ é dada por
$$ U_e = \frac{k(h-l_0)^2}{2}. $$
Finalmente, temos que a Lagrangiana do sistema é da forma
$$\mathcal{L} = T_t + T_r - U_g - U_e $$
$$ \Longrightarrow \mathcal{L} = \frac{m}{2} \left[ \dot{h}^2 - l\dot{h}\dot{\theta}\sin\theta + \frac{l^2 \dot{\theta}^2}{4} \right] + \frac{ml^2 \dot{\theta}^2}{24} + mg( h + \frac{l}{2} \cos\theta) - \frac{k(h-l_0)^2}{2} $$
$$ \Longrightarrow \mathcal{L} = \frac{1}{2}m \dot{h}^2 - \frac{1}{2}m l\dot{h}\dot{\theta}\sin\theta + \frac{1}{6}ml^2 \dot{\theta}^2 + mg( h + \frac{l}{2} \cos\theta) - \frac{1}{2} k(h-l_0)^2$$
Aplicando a equação de Euler-Lagrange em $h$, temos
$$\frac{d}{dt}\left( \frac{\partial\mathcal{L}}{\partial{\dot{h}}} \right) - \frac{\partial\mathcal{L}}{\partial{h}} = 0 $$
$$\Longrightarrow \frac{d}{dt}\left[ m\dot{h} - \frac{1}{2} ml\dot{\theta}\sin\theta \right] - mg + k(h-l_0) = 0 $$
$$\Longrightarrow \ddot{h}-\frac{1}{2}l\ddot{\theta}\sin\theta - \frac{1}{2}l\dot{\theta}^2\cos\theta - g + \frac{k}{m}(h-l_0) = 0. $$
Aplicando a equação de Euler-Lagrange em $\theta$, temos
$$\frac{d}{dt}\left( \frac{\partial\mathcal{L}}{\partial{\dot{\theta}}} \right) - \frac{\partial\mathcal{L}}{\partial{\theta}} = 0 $$
$$\Longrightarrow \frac{d}{dt}\left[ -\frac{1}{2}ml\dot{h}\sin\theta + \frac{1}{3} ml^2\dot{\theta} \right] + \frac{1}{2}ml\dot{h}\dot{\theta}\cos\theta + \frac{1}{2} mlg\sin\theta = 0 $$
$$\Longrightarrow -\frac{1}{2}ml\ddot{h}\sin\theta - \frac{1}{2}ml\dot{h}\dot{\theta}\cos\theta + \frac{1}{3}ml^2\ddot{\theta} + \frac{1}{2}ml\dot{h}\dot{\theta}\cos\theta + \frac{1}{2} mlg\sin\theta = 0 $$
$$\Longrightarrow 2l\ddot{\theta} +3(g-\ddot{h})\sin\theta = 0. $$
Portanto, o sistema físico tem como equação do movimento o seguinte sistemas de equações diferencias ordinárias:
$$\left\{\begin{array}{l} \ddot{h}-\frac{1}{2}l\ddot{\theta}\sin\theta - \frac{1}{2} l\dot{\theta}^2 \cos\theta - g + \frac{k}{m}(h-l_0) = 0 \\ 2l\ddot{\theta} +3(g-\ddot{h})\sin\theta = 0 \hbox{.} \end{array}\right. $$
Que não é nem um pouco fácil de resolver, mas que seria extremamente penoso obtê-lo por meio do formalismo Newtoniano.
Referências.
[1] Landau, L. D. Lifshitz, E. M. Mechanics. Butterworth-Heinemann. 1976.
[2] Nivaldo A. Lemos. Mecânica Analítica. 2ed. Livraria da Física. 2007.
[3] http://paginas.fe.up.pt/~mines/publicacoes_pedagogicas/apontamentos/IMC_Lagrange.pdf
Nenhum comentário:
Postar um comentário
Use cifrões para inserir um comando TeX. Por exemplo: "Afirmo que $\$ $\sqrt {2} $\$ $ é irracional".